1. Common Ground: Where They Align
Despite their architectural differences, both standards share a few core principles:
- Direct Network Management: Both rely on dedicated NM messages to manage the bus state.
- Coordinated State Transitions: The primary goal of both is to synchronize how nodes enter sleep and wake up (with a heavy focus on coordinated sleep to prevent battery drain).
- Unique Identification: Both use specific CAN identifiers for NM messages, with each node assigned a unique ID.
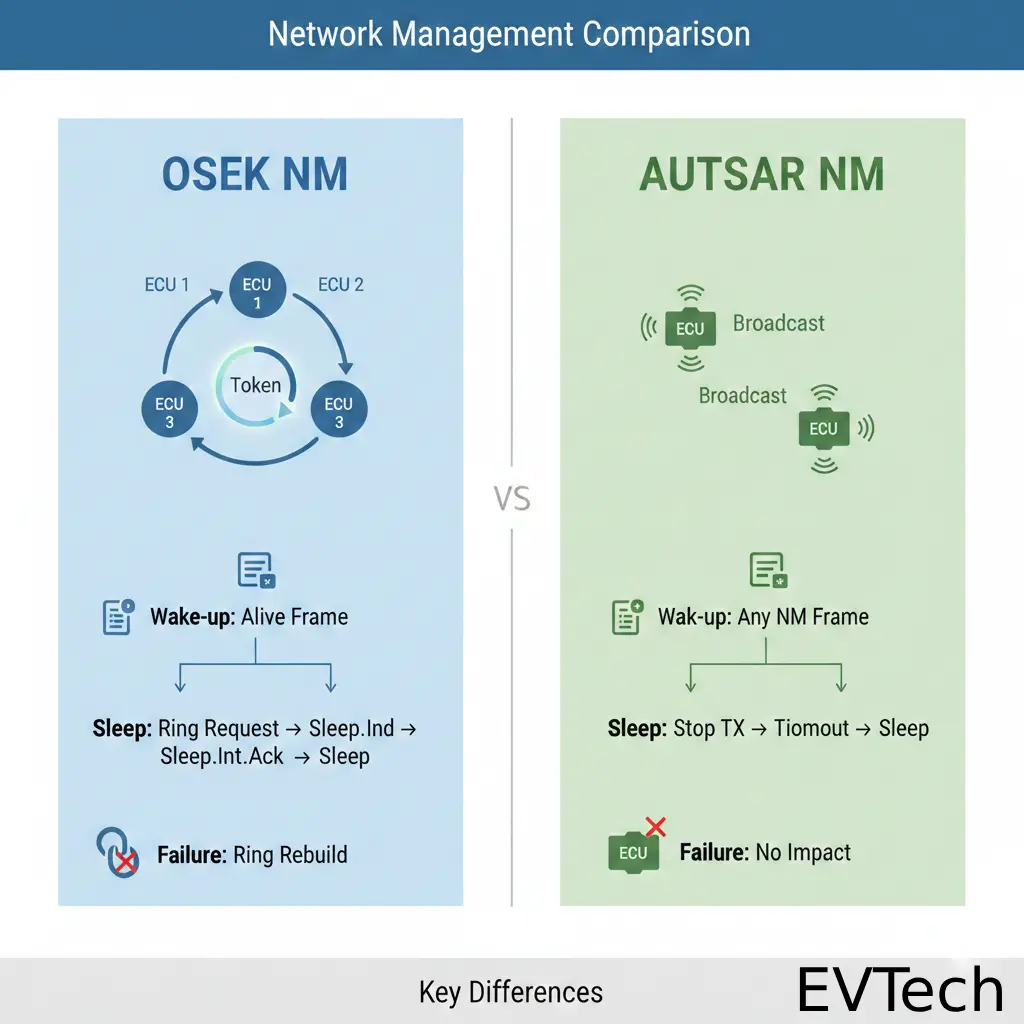
- Wake-up Trigger: The mechanism is identical—the first node to wake up sends an NM frame, which simultaneously triggers the wake-up of all other nodes on the bus.
2. Key Technical Differences
A. Wake-up Frame Requirements
- OSEK: Strict. Once the network wakes up, the first frame a node transmits must be an
Alivetype. It cannot be aRingorLimpHomeframe. - AUTOSAR: Flexible. Any valid NM frame is sufficient to initiate the process; the requirements are much more relaxed.
B. Sleep Synchronization Algorithms
- OSEK (Token Ring Mechanism): OSEK relies on a logical ring based on ECU addresses (low to high). A “token” is passed sequentially. Only the node matching the destination ID in the message holds the token.
- Ring Formation: Upon wake-up, nodes broadcast
Alivemessages to join the logical ring. Once established, they pass the “token” viaRingmessages. - Sleep Sequence: To sleep, a node sets a
Sleep.Ind(Indication) bit in itsRingmessage. Once all nodes have set this bit and acknowledged it viaSleep.Ack, the ring transitions to a “Wait Bus Sleep” state. If no wake-up event occurs within thetWaitBusSleeptimer, all nodes sleep simultaneously.
- Ring Formation: Upon wake-up, nodes broadcast
- AUTOSAR (Distributed Strategy):AUTOSAR uses a “broadcast-and-ignore” decentralized approach. Each node acts autonomously based on the NM messages it sees on the bus.
- Logic: If a node needs the bus, it periodically broadcasts NM messages. As long as any node is broadcasting, the network stays in Network Mode.
- Sleep Sequence: When a node is ready to sleep, it simply stops transmitting. However, it stays awake as long as it senses NM messages from other nodes. Once the bus goes silent for a specific timeout period (because all nodes have stopped requesting the bus), every node independently transitions to Bus Sleep Mode.
C. PDU (Protocol Data Unit) Structure
- OSEK: The PDU is relatively heavy. It contains the Source Address, Destination Address (the next jump in the ring), Command/Status bytes, and User Data.
- AUTOSAR: Much leaner. The PDU typically only includes the Source ID, basic Control Information, and User Data. There is no need for a destination address.
3. Summary & Comparison
| Feature | OSEK | AUTOSAR |
| Logic | Token Ring: All nodes must explicitly agree to sleep via “Request” and “Acknowledge” bits. | Distributed: Nodes simply stop talking when finished; silence triggers sleep. |
| Robustness | Complex: If one node fails, the entire logical ring must be rebuilt to maintain the network. | High: The failure of one node has no impact on the state machines of others. |
| Simplicity | High overhead due to ring maintenance and PDU complexity. | Minimalist; designed for scalability in complex modern architectures. |
The Verdict: While OSEK provided a very controlled environment, AUTOSAR is the modern industry preference because its decentralized nature is significantly easier to implement and much more resilient to individual node failures.


每天都在战争,希望2026和平.
Hey! Someone in my Facebook group shared this site with us so
I came to look it over. I’m definitely loving the information.
I’m bookmarking and will be tweeting this to my followers!
Outstanding blog and amazing design and style.